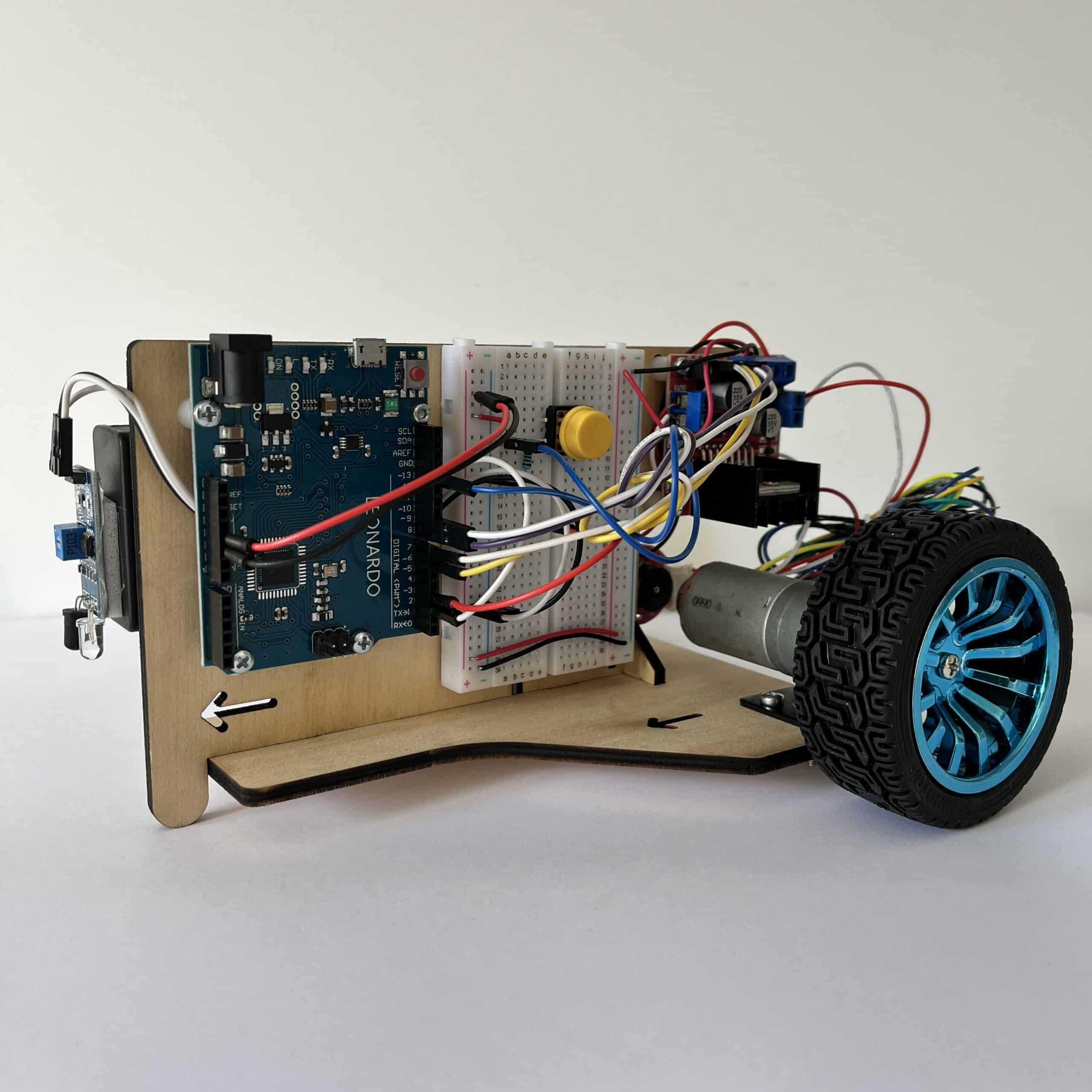
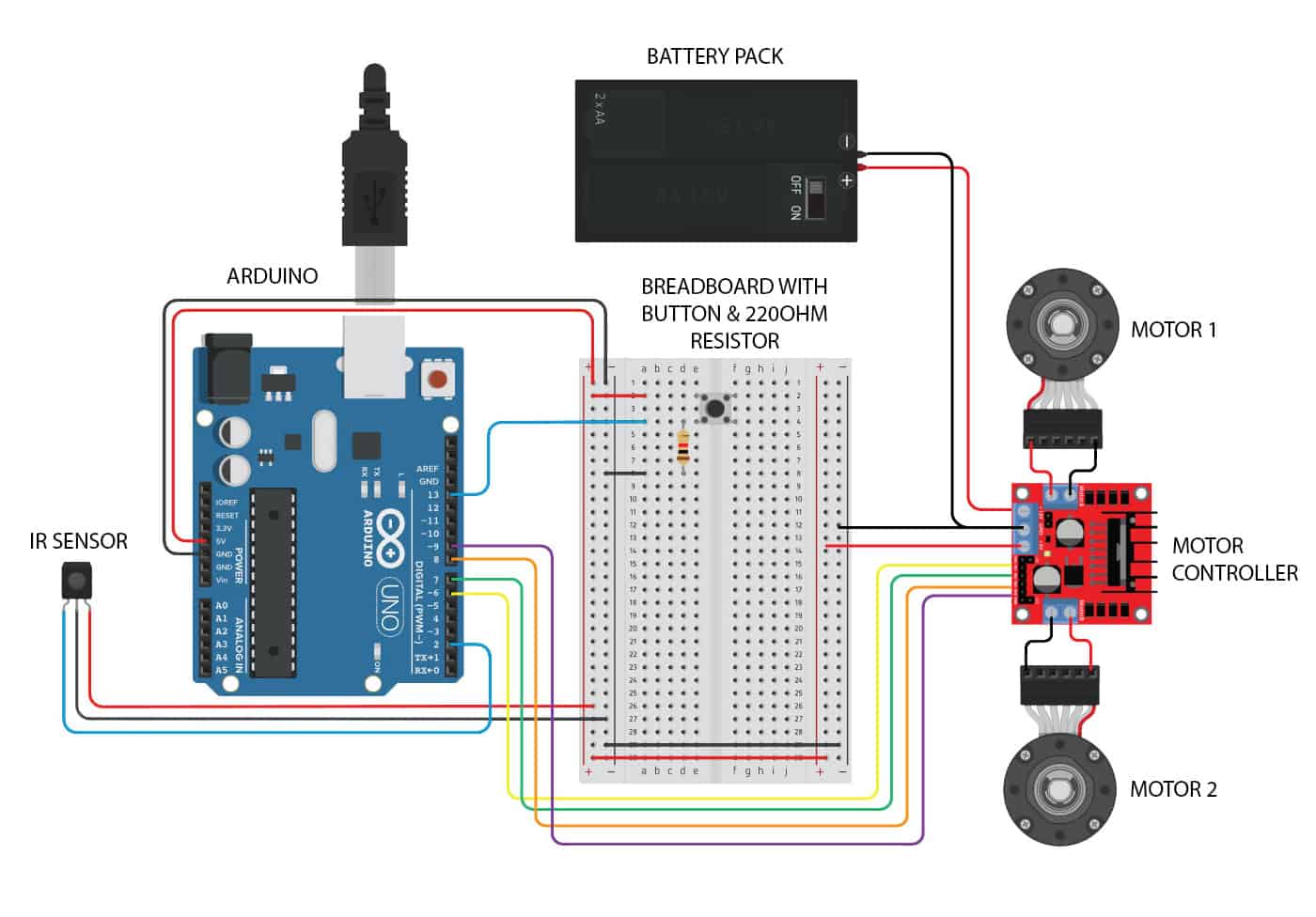
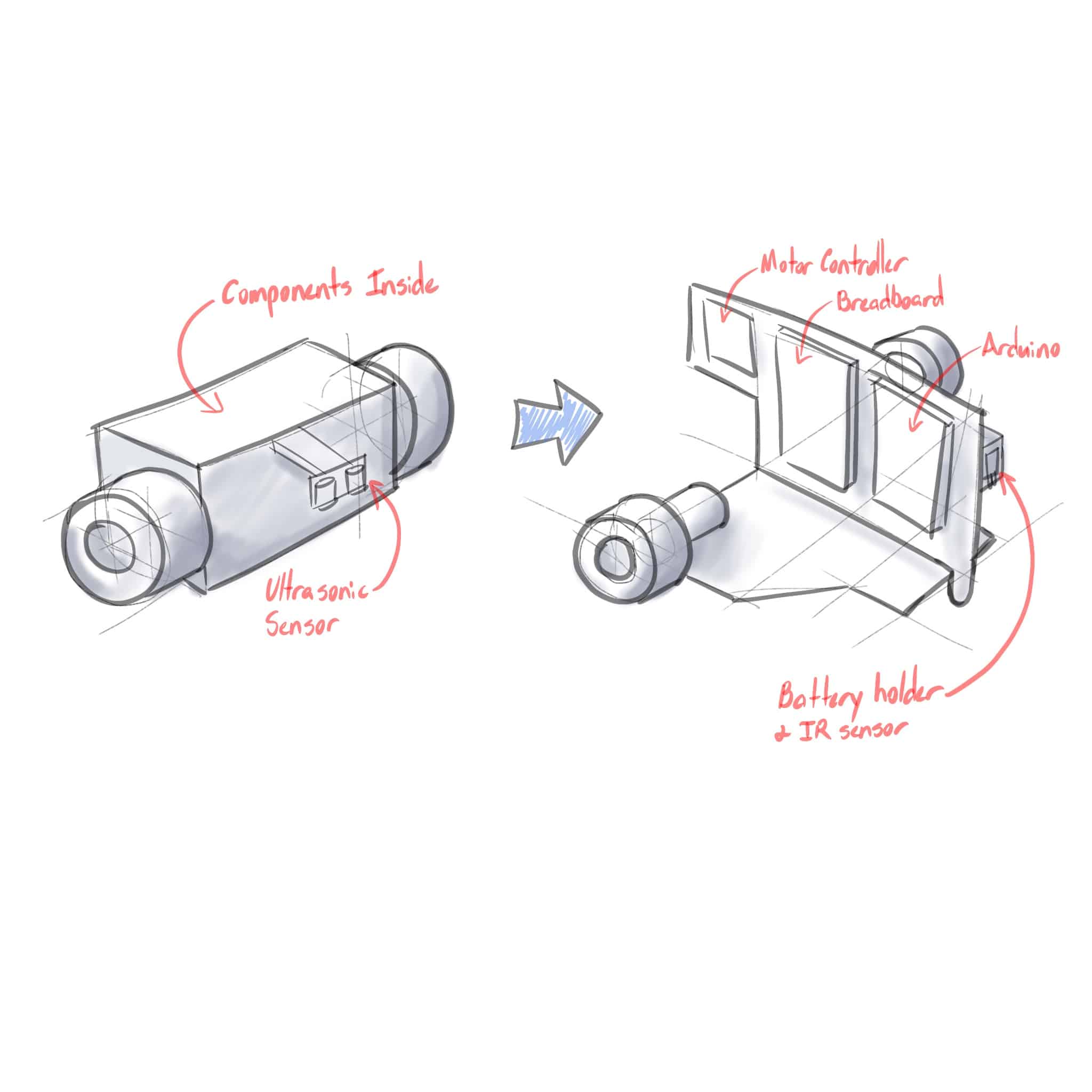
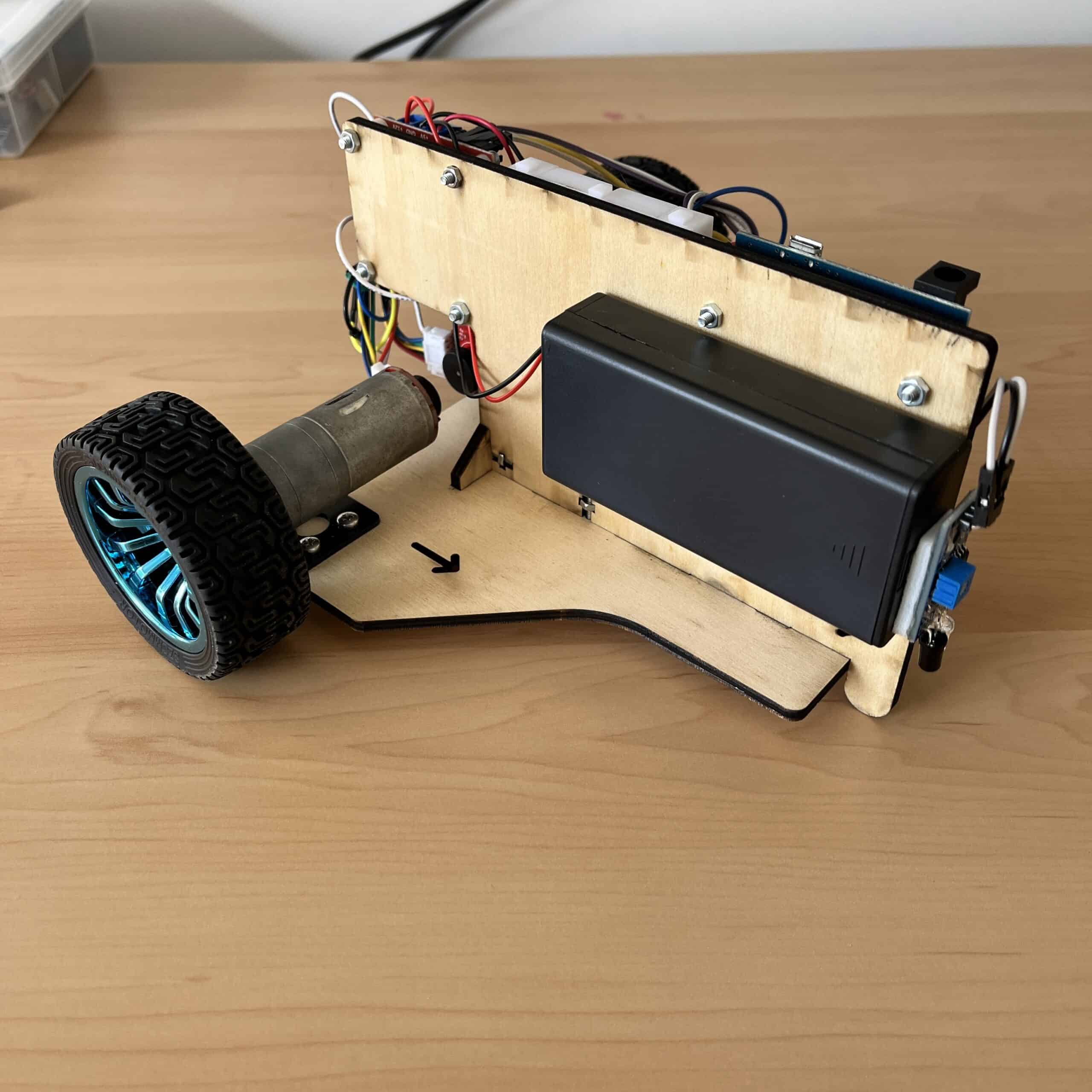
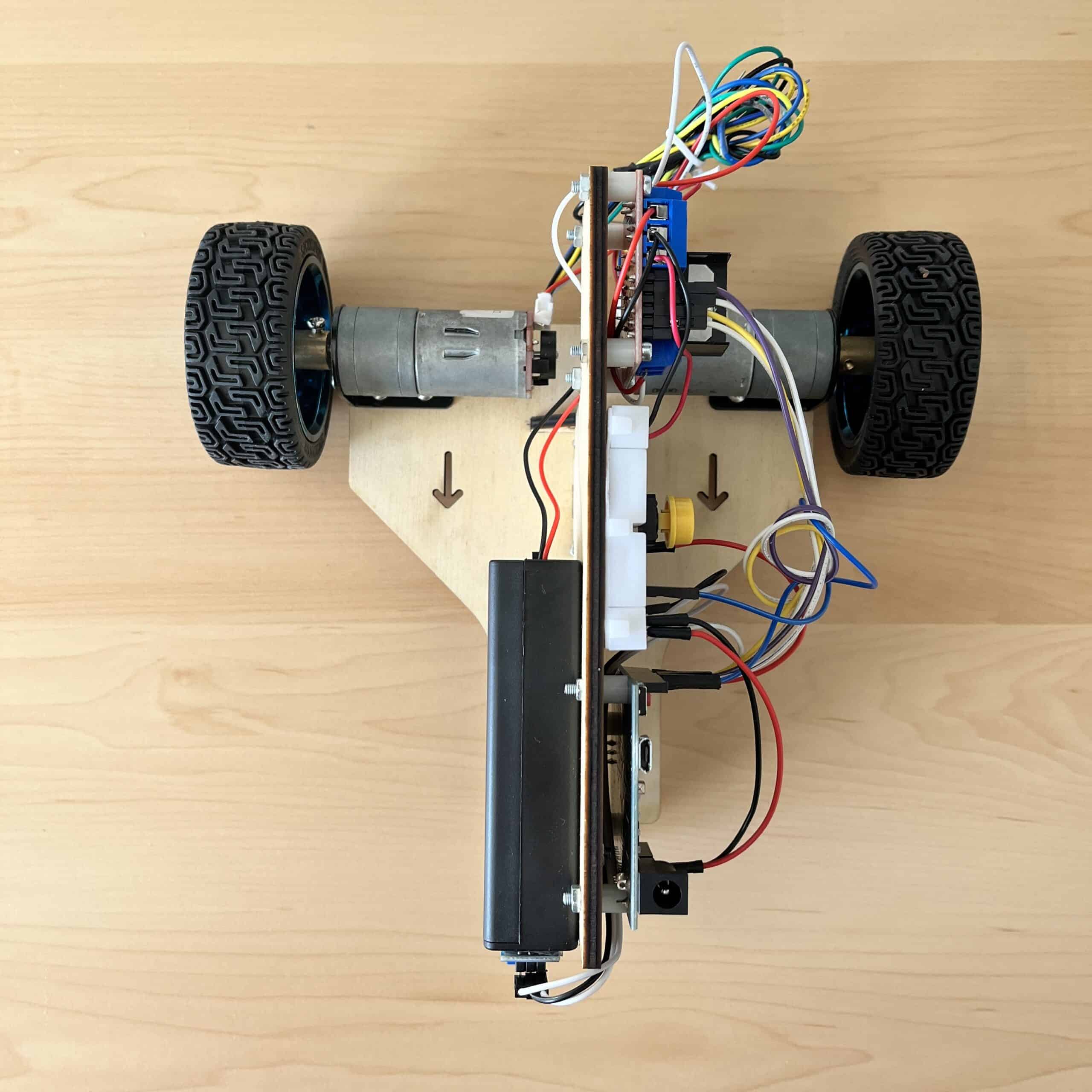
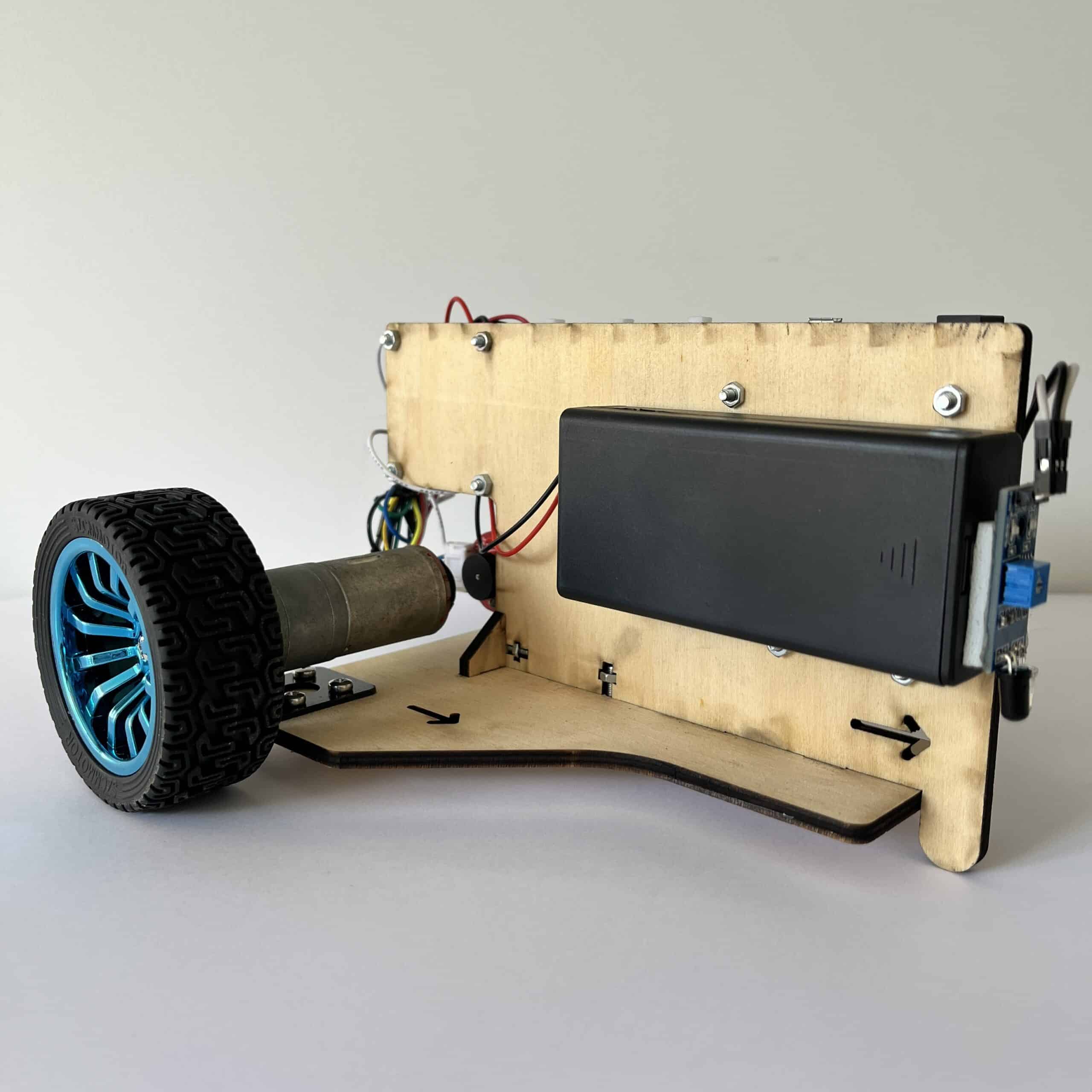
For my robotics course I designed and built an Arduino robot car that could run the length of a table as fast as possible while also stopping precisely at the end of the table. To do this, I used an IR sensor to detect the edge of the table and stop the robot. To begin, I gathered the necessary materials such as an Arduino microcontroller, motors, a chassis, and a power source. Then, I designed the car’s physical structure and determined the most efficient way to power the motors. I also added the IR sensor to the front of the car so that it could detect the edge of the table. Once the hardware was complete, I wrote a program to control the movement of the car using the Arduino. The program took into account the length of the table and the speed at which the car needed to travel, as well as the input from the IR sensor to determine when to stop the robot. Finally, I tested the car to ensure that it could run the length of the table as fast as possible while also stopping precisely at the end. Overall, the project required a strong understanding of physics, programming, and electronics, but the end result was a highly functional and impressive piece of technology.